Cambiar idioma :
Servicio de Soporte &
Descargar
Catálogos, datos técnicos y datos 3D
Ir a descargasFAQ
Preguntas frecuentes
Ir a Preguntas & RespuestasRobolink - Descargas
Aquí encontrarás un resumen de todas las descargas de Robolink.
Datos técnicos
Documentos técnicos
| Documentación técnica general de Robolink (inglés) | Instrucciones de instalación para la parte inferior del extremo del cable Robolink (Inglés) |
|---|---|
| Documentation-robolink-kit-EN.pdf | instruction_wire_tightening.pdf |
| Instrucciones de instalación para la rueda motriz estirable Robolink (Inglés) | Encoder AS5304 datos técnicos (Inglés) |
| Mounting_instruction_robolink-cable-end-bottom.pdf | Encoder_AS5304_Datasheet.pdf |
| Ficha técnica Honeywell Hall Sensor (Inglés) | Ficha técnica de Dyneema (Inglés) |
| Hall_Sensor_SS443A-Honeywell.pdf | Dyneema_data_sheet_en.pdf |
| Asignación del cable del sensor (inglés) | Ficha técnica del motor (inglés) |
| Configuration_sensorline_en.pdf | Motordatasheet_EN.pdf |
| Conexiones de diagrama de circuito & sensores (Inglés) | Cableado y derivación (alemán) |
| Schaltplan_Anschluss_Sensorik_en.pdf | Durchfuerung_von_Zugseilen_durch_ein_Gelenk_de.pdf |
| Ficha técnica E-Gripper (alemán/inglés) | Ficha técnica de e-Gripper (alemán/inglés) |
| data_sheet_E-gripper_2-jaw_de-en.pdf | data_sheet_E-gripper_3-jaw_de-en.pdf |
Dibujos técnicos
| Articulación RL-50 | Articulación RL-50-GA2 |
|---|---|
| 1xRL-50.pdf | 2xRL-50.pdf |
Software de control: IME igus® editor de movimiento para Robolink
Software de control simple e intuitivo para programar diversas configuraciones de brazo articulado. Manual de inicio rápido (PDF) incluido en el directorio.
Módulos articulados Robolink para robots - Preguntas frecuentes
¿Qué versiones conjuntas están disponibles en stock?
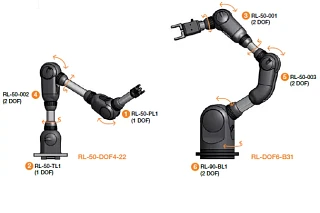
Actualmente existen 6 juntas estándar diferentes
1 — RL-50-PL1: estrictamente una
junta pivotante 2 — RL-50-TL1: estrictamente
una junta giratoria 3 — RL-50-001: una junta de 2 ejes con rango de pivote +/- 90° (" EL clásico ")
4 — RL-50-002: una junta de 2 ejes con rango de pivote +130°/-50° (" asimétrico ")
5 — RL-50-003: una junta de 2 ejes con rango de pivote de +180°/0° (" movimientos plegables ")
6 — RL-90-BL1: Junta básica con 2 ejes, (" más grande y más potente ")
También se encuentran disponibles versiones personalizadas de las articulaciones a pedido.
¿Qué posiciones angulares son posibles? ¿Pesos muertos? ¿Torque?
La siguiente lista proporciona información más básica. Esta tabla también se puede encontrar en nuestro catálogo.
| Número de pedido | Número de cuerdas | Ángulo de pivote | Ángulo de rotación | Peso | Máx. Cargar | ||||
|---|---|---|---|---|---|---|---|---|---|
| Unidad integrada | Alimentación a través opcional | Estándar (con stop dog) | Opción (*sin perro de parada) | Estándar (con stop dog) | Opción (*sin perro de parada) | [gr] | Pivotación (Nm) | Rotación (Nm) | |
| 1. Junta pivotante RL-50-PL1 | 2 | 4 | 180° (±90°) | 210° (±105°) | - | - | 235 | 12 | - |
| 2. articulación giratoria RL-50-TL1 | 2 | 8 | - | - | 340° (±170°) | 540° (±270°) | 245 | - | 5 |
| 3. Junta de 2 ejes RL-50-001 | 4 | 4 | 180° (±90°) | 210° (±105°) | 340° (±170°) | 540° (±270°) | 345 | 12 | 5 |
| 4. Junta de 2 ejes RL-50-002 | 4 | 4 | 180° (+130°/-50°) | 240° (+135°/-105°) | 340° (±170°) | 540° (±270°) | 345 | 12 | 5 |
| 5. Junta de 2 ejes RL-50-003 | 4 | 4 | 180° (+180°/0°) | 235° (+180°/-55°) | 340° (±170°) | 540° (±270°) | 400 | 12 | 5 |
| 6. Articulación básica RL-90-BL1 | 4 | 8 | 180° (±90°) | 190° (±95°) | 180° (±90°) | - | 120 | 20 | 10 |
¿Cómo se pueden combinar las articulaciones?
Cada junta individual está equipada con cables de trefilado. Éstos deben ser guiados a través de la articulación ubicada respectivamente debajo. Este requisito restringe las combinaciones de juntas disponibles. Sin embargo, es posible combinar brazos articulados individuales con 1 a 6 DOF, y renderizar una variedad de cinemáticas. Con mucho gusto le asesoraremos. El siguiente diagrama muestra una posible combinación: ¡hay muchas otras opciones disponibles con los nuevos tipos de juntas RL-50-003 y RL-90-BL1
!
¿Qué se entiende por " Sistema de kit de construcción "?
La idea subyacente detrás del kit de construcción Robolink es que nuestros clientes tienen acceso a componentes individuales (mecánicos) que se pueden utilizar para construir un sistema robótico. Dependiendo de la complejidad y los requerimientos, los brazos articulados se pueden configurar y pedir con una variedad de complejidades. igus® construye los brazos según las especificaciones del cliente y entrega unidades listas para conectar. Sin embargo, no es posible conectar juntas individuales (" como con LEGO® ").
¿Por qué no es posible simplemente reconfigurar los brazos articulados sin asistencia?

Todas las juntas son operadas con alambres de dibujo. Se necesitan 2 alambres por grado de libertad (principio antagónico). Si los cables de la junta superior (2) fueran encaminados a través de la junta inferior sin guía (1), el movimiento de las dos juntas ya no sería independiente entre sí. Para lograr esta independencia, es necesario desacoplar la tensión del alambre de la articulación superior (2) de los movimientos de la articulación inferior (1). Esto se logra con un sistema especial de cable Bowden en la abertura de la junta inferior (ver Figura). Luego, los cables viajan independientemente uno al lado del otro en los tubos de conexión entre las juntas.
Al pedir sistemas multieje de igus®, todos los elementos del sistema de cable Bowden están premontados y el sistema completo siempre se entrega listo para instalar con todos los cables y tubos en la configuración especificada.
- Manguera neumática (pinza)
- 4 x Sistema de cable Bowden Cable
- sensor - junta 2
- 4 hilos viajan libremente en el tubo
- Sistema de cable Bowden individual para la rotación
- 8 alambres viajan libremente en el tubo
¿Qué recorrido del cable/fuerzas se necesitan para mover las articulaciones?
El punto de ataque de los alambres en el interior de la articulación se define por la especificación de tamaño:
RL-50: Diámetro efectivo: 50 mm (Movimiento giratorio y de pivote)
RL-90: Diámetro efectivo: 90 mm (movimiento de pivote), o 120 mm (movimiento giratorio)
El recorrido del cable en una junta RL-50 se calcula por lo tanto como
π x d/4 ≈ 39 mm para un movimiento angular de 90°
π x d/2 ≈ 79 mm para un movimiento angular de 180° Las fuerzas del alambre de arracado
(dependiendo del par aplicado) pueden ser de hasta 600 N.
¿Qué se incluye en el alcance entregado para una articulación?
- Junta ensamblada, hecha de (PA 2200), incl. ubicaciones de rodamientos (aluminio anodizado duro = estándar)
- Cables Dyneema®
- Varillas de aluminio (estándar = 100 mm respectivamente incluidos, longitudes personalizadas bajo pedido) Sensores angulares opcionales (-WS)
- , cable sensor de 3 m, ensamblado y probado. Tina de alambre como material de conexión, sin cargo basado en consulta
.
¿Qué se incluye en el alcance entregado para un brazo articulado?
- Todas las juntas premontadas según el artículo 7)
- todos los cables enrutados a través de segmentos especiales Bowden según el punto 5)
- Tubos de aluminio entre las juntas, adaptados a las especificaciones del cliente
- Placa de montaje en la base del brazo Cables de
- sensor enrutados a través (opción -WS), respectivamente 3 m de cable sensor ensamblado y probado. Tina de alambre como material de conexión, sin cargo basado en consulta
.
¿Qué se incluye en el alcance entregado para un sistema completo " "?
Juntas articuladas como se describe en la pregunta 6), pero con unidad motriz MIT adicional, que consiste en:
- motores escalonados igus®, el número corresponde al número de ejes en el brazo
- Engranaje planetario para cada motor
- " Rueda motriz " para conectar los cables al accionamiento
- " Herramienta tensora " para volver a tensionar de manera conveniente las ruedas motrices
- Carcasas en las que se ensamblan los motores, y en las que se construye el brazo - en varias configuraciones
todo completamente ensamblado, pretensionado y probado.
NO incluido:
- Pinzas (opcionalmente disponibles en igus®, otros productos también pueden ser adaptados)
- Componentes de control
- Cables de alimentación (opcionalmente disponibles en igus ®)
¿Qué sensores de ángulo están en uso?

Las juntas están equipadas (como opción) con sensores de ángulo incremental de Austriamicrosystems (AS5304A). Actualmente, los codificadores absolutos no son técnicamente posibles. La posición de inicio se define con un sensor Hall que se encuentra respectivamente en el centro del pivote o rango de rotación de la articulación. Esto significa que cada junta debe ser primero " homed " cuando se suministra energía. Puede encontrar más información sobre la configuración del sensor y el enrutamiento de cables en nuestra documentación.
La resolución del codificador es (¡diferente entre las articulaciones!):
- 4,640 señales/360° en todos los movimientos rotacionales de tamaño de articulación RL-50
(29 pares de polos x 160 señales/par de polos) ≈ 0.078° - 4,960 señales/ 360° en todos los movimientos de pivote de tamaño de articulación RL-50
(31 pares de polos x 160 señales/par de polos) ≈ 0.073° - 9,920 señales/360° en todos los movimientos de tamaño de articulación RL-90 (" Base ")
(62 pares de polos x 160 señales polo / 160 señales polo/par) ≈ 0.036
Sensores estándar:
sensores magnéticos de ángulo incremental. Los sensores tienen una resolución de ~0.07° por eje. Todas las unidades de sensor están listas para su instalación para las juntas respectivas. Respectivamente incl. 3 m de cable sensor (6 núcleos por DOF)
- Sensor Hall movimiento giratorio
- Codificador de movimiento giratorio Codificador de movimiento giratorio
- Sensor Hall movimiento giratorio
¿También se pueden usar brazos articulados en el agua?
Sí, los componentes consisten principalmente en plásticos (PA2200), aluminio anodizado, acero inoxidable (tornillos), alambres Dyneema (PE), tetinas de latón. Los sensores se pueden pedir en una versión sellada (-SE = codificador sellado
).


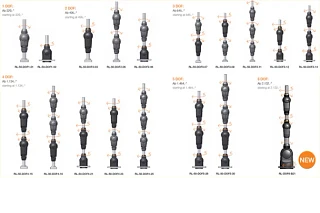
¿Qué versiones de unidades están disponibles?

Se puede utilizar una amplia gama de unidades para mover los cables. Las opciones incluyen accionamientos manuales (" manivela "), neumáticos (por ejemplo: músculo neumático) o motores eléctricos (BLDC, DC, servo, lineales, motores paso a paso). igus® proporciona motores paso a paso con engranajes planetarios como una opción de accionamiento disponible. Opciones disponibles:
- Motor paso a paso NEMA23 (versión hebra o conector) con engranaje planetario 1:16
- Motor paso a paso NEMA17 (versión hebra o conector) con motor paso a paso de engranaje planetario 1:35
- caja de cambios
- planetaria
- rueda motriz tensionable
¿Cómo se controlan o manipulan los brazos articulados Robolink?
igus® no desarrolla, construye ni vende componentes de control. La extensión disponible de un sistema Robolink es el brazo articulado o el brazo articulado con " unidad de accionamiento ".
Los componentes de control deben ser proporcionados o comprados por el cliente
.
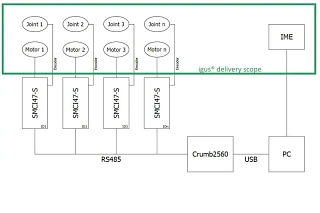
igus® cuenta con software de control gratuito para brazos articulados Robolink con nuestros motores escalonados (open source). Esta es una plataforma de software fácil de usar e intuitiva para ingresar posiciones angulares y para guardar movimientos simples. El software no es adecuado para interactuar con otros sistemas. No se incluye un control de contorno (o cinemática inversa). Se requiere una configuración de hardware específica para utilizar el software IME (igus® motion editor). Esto consiste esencialmente en el control del motor paso a paso NANOTEC® (SMCI47-S2) y un chip ATMega Crumb2560. El chip ATMega estará disponible en igus® durante la primavera de 2014 (actualmente en CHIP45 en Internet). Por lo tanto, se necesitan las siguientes configuraciones:
¿Qué necesito hacer para utilizar el software de código abierto IME (igus motion editor) de igus®?
El software está disponible como descarga gratuita. Es una interfaz gráfica de usuario que se puede utilizar para programar y almacenar movimientos simples. No se incluye un control de contorno (o cinemática inversa)
.
¿Qué materiales están en uso?
Juntas:Componentes de poliamida PA 2200, tornillos V2A, anillos de cojinetes de aluminio anodizado duro, alternativamente: iglide
Tubos de conexión: Aluminio anodizado, alternativamente: FGC o CFC.
**Cuerdas:**Alambres Dyneema®, pezones finales de latón.
¿Qué agarraderas se pueden utilizar?
" Cualquier pinza " concebible se puede combinar con nuestros brazos articulados. Debido a la capacidad de carga total relativamente baja del sistema, las pinzas deben ser lo más ligeras posible. Hay disponible una amplia gama de pinzas neumáticas ligeras, por ejemplo, de SCHUNK, FESTO o FIPA. Frecuentemente, el uso de neumática no es deseable. Las pinzas eléctricas necesitan ser utilizadas en este caso Las pinzas eléctricas muy ligeras están disponibles en GIMATIC, SCHUNK o SOMMER (sin embargo, todas estas son significativamente más costosas que las pinzas neumáticas simples). Desde 2013, igus® ha estado ofreciendo pinzas de plástico simples, donde el motor eléctrico se coloca en el tubo Robolink. Las almohadillas de agarre también se pueden personalizar opcionalmente en este caso
.
¿Qué cuestan las juntas o los sistemas " "?
Todos los precios de juntas y sistemas individuales se pueden encontrar en nuestro catálogo. Como regla general: un " sistema completo " con motores, engranajes, carcasa, juntas, y sensores cuesta un poco más de $1,200.00 por eje. Por ejemplo, aprox. $7,200.00 para un sistema 6 DOF. Un brazo articulado SIN motores (pero con sensores) es aproximadamente la mitad (por ejemplo, $600.00/eje). Ejemplo:


¿Dónde puedo obtener más información?
Contacto
¿Preguntas o información sobre productos? Por favor, póngase en contacto con:
igus® México.+52 728 2843185Correo
Servicio al cliente
Servicio al Cliente:
Teléfono: De lunes a viernes, de 8:00 a 20:00
Chat en vivo: 24 horas